FOC理论准备

前言
作者本人也是在网上找资料学习的这部分内容,如有错误还请指正。本文中有对其他作者的文章的引用说明,如有忘记声明处还请大家指出。这里也非常推荐大家去看看稚晖君的教程,写得非常详尽,本文也有多处地方引用此文章的语句。
电机的机械角度和电角度
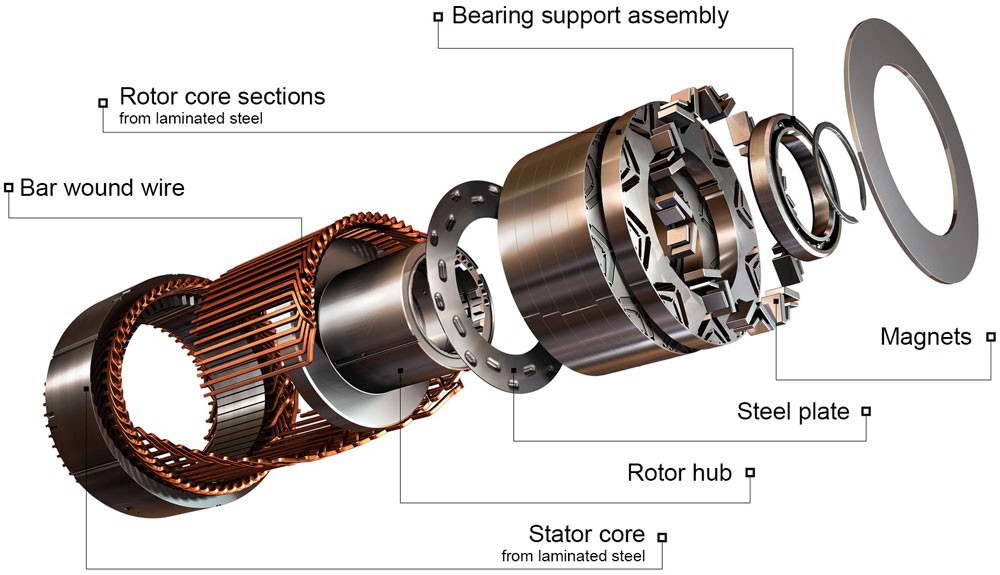
由硬件篇电机部分所描述的,极数的差异而产生了机械角度和电角度(电周期)的概念。机械角度”就是电机旋转一圈的空间几何角度。转子轴从某个位置开始旋转并返回到原位置的角度是360度。而电角度则是将对绕组(线圈)施加电压的开关的一个切换周期视为360度。
如果是2极3槽的电机,那么其机械角度和电角度是一致的。而如果是4极6槽,则其机械角度是360度,其电角度是两个周期(也可以表达为“当机械角度为180度时,电角度达到360度”,或者说“在一个电周期内转子只转半圈”)。
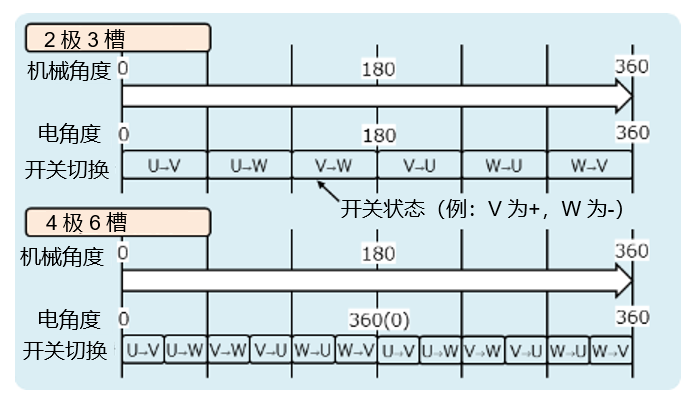
对于电机的编码器,其角度都是来表示转子的机械角度位置。而电机驱动器输出的电信号则是基于电角度的,因为电信号源于开关一个切换周期的反复。角度的概念已经变得非常重要,所以我们需要清楚地了解这些概念以及它们之间的关系。
无刷电机控制方式和差异
六步换相
无刷电机的六步换相(Six-Step Commutation)是一种经典的控制方式,主要用于三相无刷直流电机(BLDC)。它也被称为梯形波控制(Trapezoidal Commutation),因其电压或电流波形呈梯形得名。
六步换相的工作方式
三相BLDC电机有3根绕组(A、B、C),电机驱动器每次只通电两相,悬空一相,电流在6个步骤中按顺序换相,从而驱动电机旋转。每个电周期(Electrical Cycle)中包含6个换相步骤,每步持续60电角度,因此称为“六步”。
| 步骤 | A相 | B相 | C相 |
|---|---|---|---|
| 1 | + | - | Z |
| 2 | + | Z | - |
| 3 | Z | + | - |
| 4 | - | + | Z |
| 5 | - | Z | + |
| 6 | Z | - | + |
说明:+为上桥导通,-为下桥导通,Z为高阻/不通电
- 优点:控制算法简单,成本低
- 缺点:精度差,运行不一定流畅平滑,该控制方式很难做到对电机的电流(力矩),位置做到闭环控制。采用方波控制,噪声较大。
FOC(Field-Oriented Control)控制
- 优点:转矩平稳,噪声小,响应快速。可以进行电流(力矩)、速度、位置三个闭环控制。
- 缺点:成本高,控制算法难度大
FOC控制原理
对于FOC控制过程来说,最重要的就是对电机相电流的变换和反变换。
关键前置知识
PWM, SPWM, SVPWM
PWM(Pulse Width Modulation 脉冲宽度调制)
按一定规律改变脉冲序列的脉冲宽度,以调节输出量和波形的一种调制方式。PWM是脉冲宽度调制也就是具有一定脉冲宽度的连续的方波组成。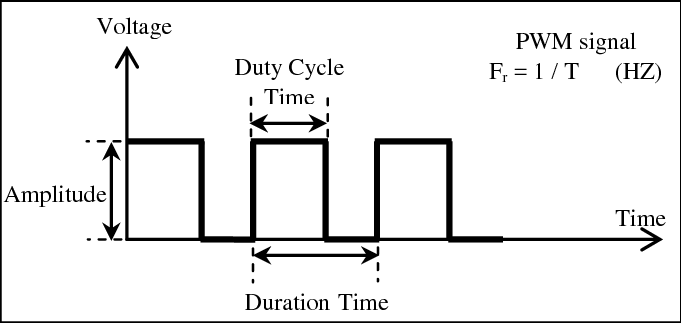
SPWM(Sinusoidal PWM 正弦脉宽调制)
该技术是基于PWM的,是对脉冲宽度进行正弦规律排列的调制方式。这样其输出可以近似为正弦波。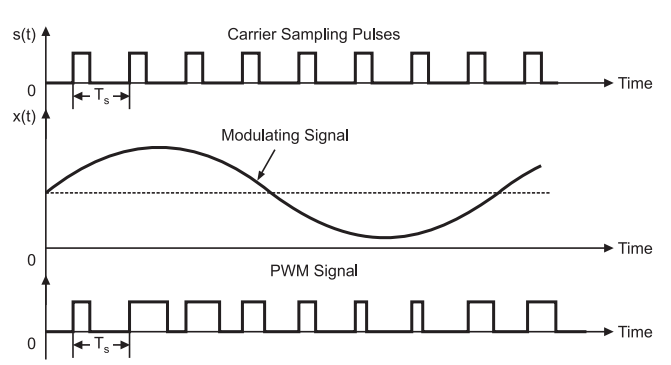
其产生的方式为正弦波和三角波相交而成,其中正弦波相当于调制波,三角波相当于载波,其生成过程如下图。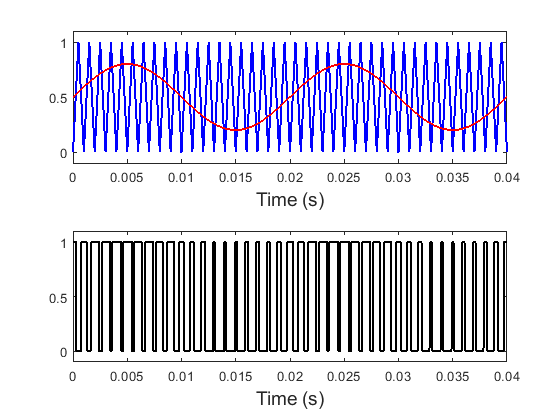
这里我们要注意,三角波(载波)的振幅要大于正弦波(调制波)的振幅,否则正弦波的波峰和波谷就会被“削去”。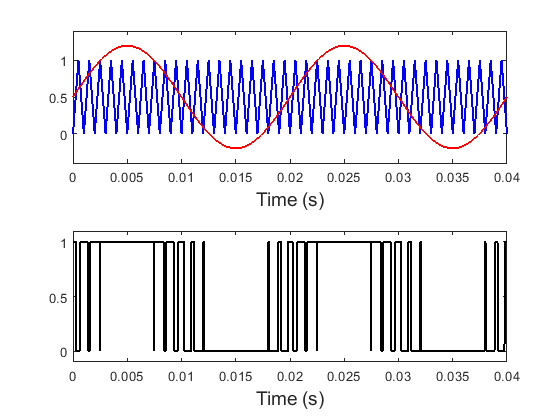
SVPWM(Space Vector Pulse Width Modulation 电压空间矢量PWM)
SVPWM和SPWM虽然名字很像,但是其时没有很大的关系。SPWM着重于生成一个可以近似于正弦波的PWM波,对于电机控制来说其关注点只在于它自己需要调制的那个正弦波。而SVPWM则是关注于电机整体,使得输出电压波形尽可能接近于理想的正弦波形,着眼于如何使电机获得理想圆形磁链轨迹!要了解SVPWM就得先了解什么是空间电压矢量。
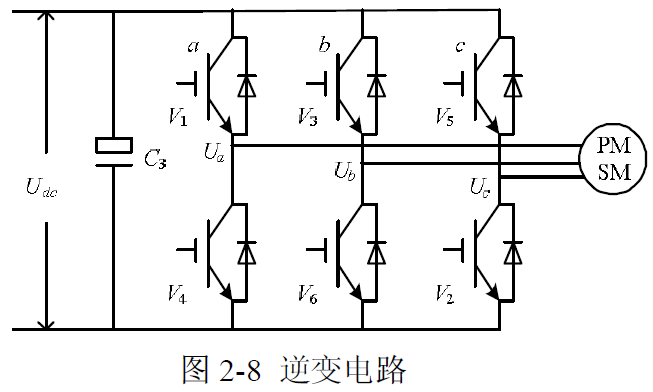
首先我们要看逆变器的电路原理图:
为了便于理解,我们将PMSM的线圈展开绘制出来:
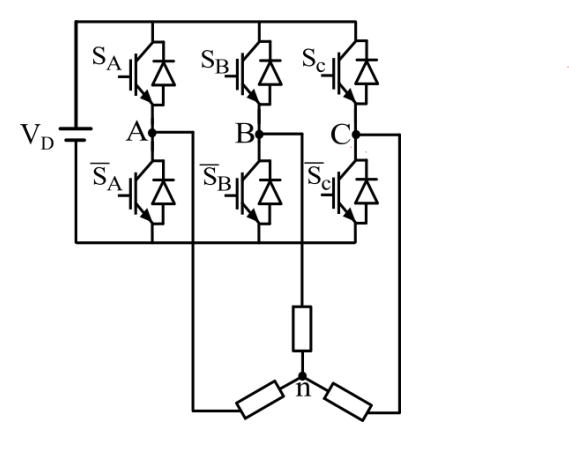
SVPWM算法实际上计算的是上图所示逆变器的六个开关何时导通,何时切断。我们可以看到这六个开关管是两两一组的,也就是形成了三组。对于每一组开关管,与VD高电位相连的我们称之为上桥臂,而与VD的低电位相连的我们称之为下桥臂,每一组这个整体我们称之为半桥。
而对于每一个半桥都有两个状态:
- 上桥臂导通,下桥臂截止(定义为状态1)
- 下桥臂导通,上桥臂截止(定义为状态0)
三个半桥就有23个状态,也就是000、001、010、011、100、101、110、111
- 空间电压矢量:我们将上述的三个桥的状态的组合就定义为空间电压矢量Un = (Sa, Sb, Sc)。之中有6个非零矢量和2个零矢量(U0 = (0, 0, 0), U7 = (1, 1, 1))可以看出零矢量状态下电机三相间电压都为0不产生转矩。我们将矢量画在ABC坐标系下(也就是由三相电流组成的坐标系中)
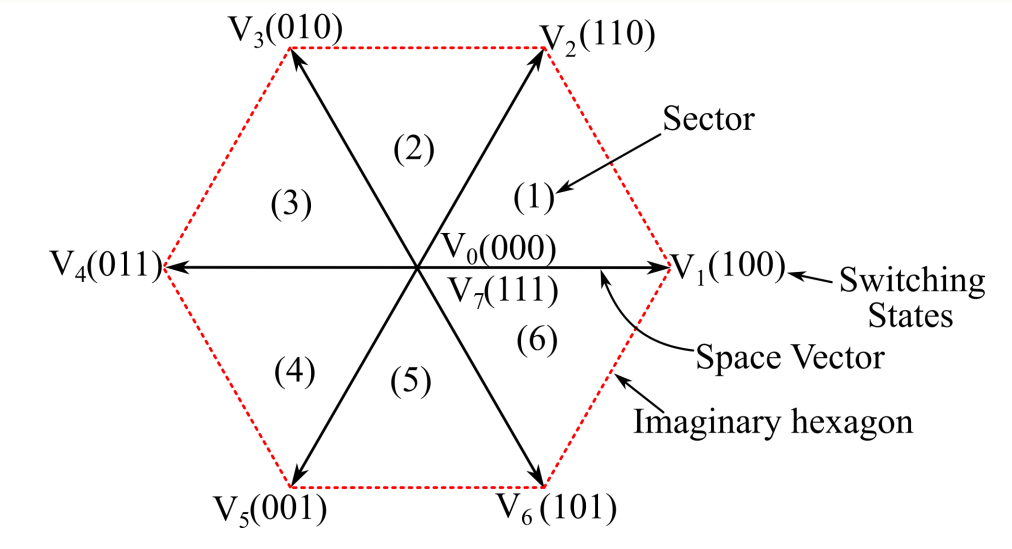
其中,V1(1, 0, 0)与IA相同,V3(0, 1, 0)与IB方向相同,V5(0, 0, 1)与IC方向相同。
它们的端点组成了一个正六边形,同时把平面划分成了六个扇区(也就是图中的(1)、(2)、(3)、(4)、(5)、(6))在每一个扇区,选择相邻两个电压矢量以及零矢量,按照伏秒平衡原则来合成每个扇区内的任意电压矢量。这也正是源自于PWM的核心思想,合理地配置不同基向量在一个周期中的占空比,就可以合成出等效的任意空间电压矢量 ∫0TUrefdt = ∫0TxUxdt + ∫TxTx + TyUydt + ∫Tx + TyTU0*dt 写成离散表达式如下: Uref ⋅ T = Ux ⋅ Tx + Uy ⋅ Ty + U0* ⋅ T0*
U0*指的是两个零矢量,可以是U0也可以是U7,零矢量的选择比较灵活,通过合理地配置零矢量可以让空间电压矢量的切换更平顺,可最大限度地减少开关次数,尽可能避免在负载电流较大的时刻的开关动作,最大限度地减少开关损耗。
调制方式:
七段式调制(7-segment SVPWM)
零矢量对称分布在电压矢量序列的两端,一共7个开关动作,每个周期中相同的矢量对称出现。例如:V0 → V4 → V6 → V7 → V6 → V4 → V0
优点:谐波小,对称性好,实现简单也最常用
Uref所在扇区 开关切换顺序 (1)区 0-4-6-7-6-4-0 (2)区 0-2-6-7-6-2-0 (3)区 0-2-3-7-3-2-0 (4)区 0-1-3-7-3-1-0 (5)区 0-1-5-7-5-1-0 (6)区 0-4-5-7-5-4-0 五段式调制(5-segment SVPWM)
零矢量只在一端使用(只用 V0 或 V7),不对称,省略了一端的零矢量插入。例如:V4 → V6 → V7 → V6 → V4
优点:开关频率低
缺点:谐波较高
九段式调制(9-segment SVPWM)
零矢量插入在三处:前、中、后,用更多零矢量来均衡电压和磁链。例如:V0 → V4 → V0 → V6 → V7 → V6 → V0 → V4 → V0
该方法使用很少,开关频率最高,损耗也最大,控制逻辑也复杂
更多调制方式可以阅读相关文献,这里不再深入探讨。
Clark变换,Park变换,反Park变换
Clark变换
三相电路计算困难,将三相等效成二相。根据基尔霍夫电流定律(KCL):任意时刻流入节点的电流和等于流出节点的电流和。因此我们只需要知道其中两个电流就可以推导出第三相的电流。其变换过程和变换矩阵如下:
K为何是
? Clark 变换的矩阵本身并不保持矢量长度(不是正交变换),所以变换前后的矢量模长(幅值)会变化。为了让变换前后的幅值不变,就需要再乘一个比例系数。
若要进行等功率Clark变换则
若想更深入了解可查看这篇文章
经过如上Clark变换,就成功将三相电流变为了新的两相电流,但对于控制两相正弦波电流来说仍然是一件困难的事情。
Park变换
若要将正弦的两个变量转为常量来控制,则需要让坐标系跟着两个变量一起旋转。也就是坐标系和新的两相电流的矢量相对静止了(这么表述肯定不严谨,但是最本质的思想是这个意思)。其变换过程如下:
反Park变换
即为Park变换的逆变换
FOC控制流程
先附上FOC控制流程的PID环
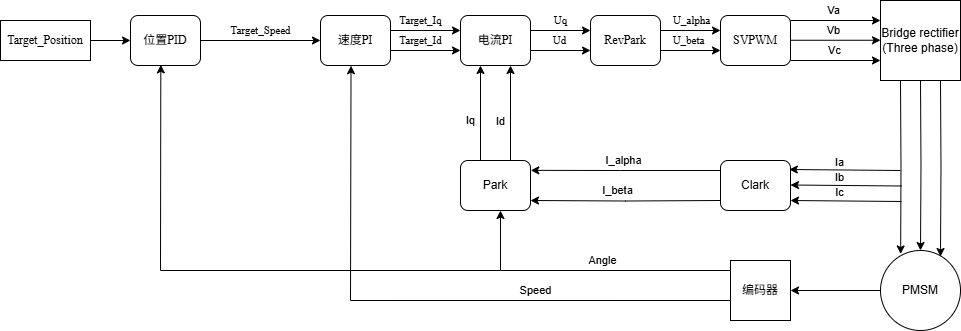
图片中Target开头的代表设定值,即用户希望的值的大小
该PID是常见的位置-速度-电流三环控制,其中位置可以只用P项或者PI项。在位置控制中,由于电机转速很低,所以编码器微分得到的角速度不一定准确,因此往往去掉速度环而直接使用位置-电流双环控制。可以看到,前文的知识点都是在为FOC控制的电流环服务的,由此可见电流环的重要程度非常高。
- Title: FOC理论准备
- Author: Eviarch
- Created at : 2025-06-26 17:01:54
- Updated at : 2025-06-26 17:01:54
- Link: https://blog.eviarch.com/2025/06/26/FOC理论准备/
- License: This work is licensed under CC BY-NC-SA 4.0.